|
JKQTPlotter trunk/v5.0.0
an extensive Qt5+Qt6 Plotter framework (including a feature-richt plotter widget, a speed-optimized, but limited variant and a LaTeX equation renderer!), written fully in C/C++ and without external dependencies
|
|
JKQTPlotter trunk/v5.0.0
an extensive Qt5+Qt6 Plotter framework (including a feature-richt plotter widget, a speed-optimized, but limited variant and a LaTeX equation renderer!), written fully in C/C++ and without external dependencies
|
Functions | |
| template<class InputItX, class InputItY, class OutputItP> | |
| void | jkqtpstatPolyFit (InputItX firstX, InputItX lastX, InputItY firstY, InputItY lastY, size_t P, OutputItP firstRes) |
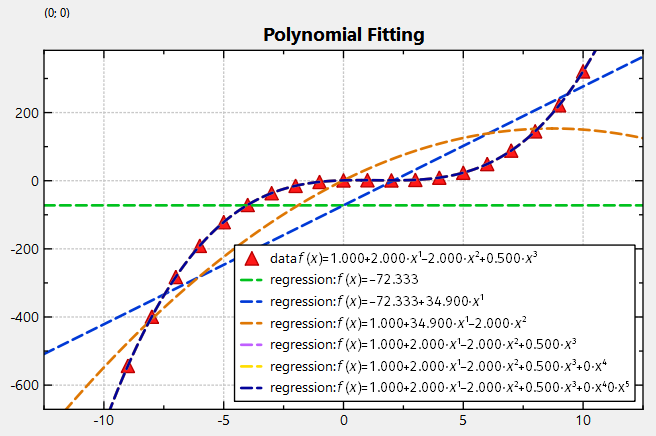
fits (in a least-squares sense) a polynomial   | |
|
inline |
fits (in a least-squares sense) a polynomial
| InputItX | standard iterator type of firstX and lastX. |
| InputItY | standard iterator type of firstY and lastY. |
| OutputItP | output iterator for the polynomial coefficients |
| firstX | iterator pointing to the first item in the x-dataset to use  | |
| lastX | iterator pointing behind the last item in the x-dataset to use  | |
| firstY | iterator pointing to the first item in the y-dataset to use  | |
| lastY | iterator pointing behind the last item in the y-dataset to use  | |
| P | degree of the polynomial (P>=N !!!) | |
| [out] | firstRes | Iterator (of type OutputItP ), which receives the (P+1)-entry vector with the polynomial coefficients  |
This function uses jkqtpstatLinSolve() to solve the system of equations
![\[ \begin{bmatrix} y_1\\ y_2\\ y_3 \\ \vdots \\ y_n \end{bmatrix}= \begin{bmatrix} 1 & x_1 & x_1^2 & \dots & x_1^P \\ 1 & x_2 & x_2^2 & \dots & x_2^P\\ 1 & x_3 & x_3^2 & \dots & x_3^P \\ \vdots & \vdots & \vdots & & \vdots \\ 1 & x_n & x_n^2 & \dots & x_n^P \end{bmatrix} \begin{bmatrix} p_0\\ p_1\\ p_2\\ \vdots \\ p_P \end{bmatrix} \]](form_129_dark.png)
![\[ \vec{y}=V\vec{p}\ \ \ \ \ \Rightarrow\ \ \ \ \ \vec{p}=(V^TV)^{-1}V^T\vec{y} \]](form_130_dark.png)